Master file for simulating the quarter car model.
Name: Matthew Klein, Contact: [email protected], Date: 3/28/14
Contents
Clear old data, Designate global variables
clear; close all; clc; global A B v_in dt g
System Parameters
System Constants
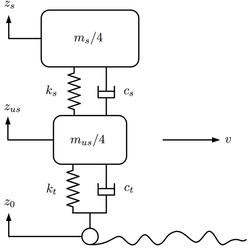
g = 9.81; % [m/s^2] % masses m_s = 1500/4; % corner mass is 1/4th the full mass, [kg] m_us = m_s/7; % 1/7th the body corner mass, [kg] % springs - The displacements are intuitively derived in order to create % relatively realistic stiffness values for the compliance elements. d_s = 2*.0254; % equilibrium displacement of spring, [m] d_t = d_s/5; % equilibrium displacement of tire, [m] k_s = m_s*g/d_s; % Spring stiffness, [N/m] k_t = (m_s+m_us)*g/d_t; % Tire stiffness, [N/m] % damping - a damping ratio of 0.5 was selected. This is a common value % for automotive suspensions as it balances cornering traction with comfort. zeta = 0.5; % Damping ratio b_c = 2*sqrt(k_s*m_s); % Critical damping coefficient b_s = zeta*b_c; % Damping coefficient b_t = .1*2*sqrt(k_t*(m_s+m_us)); % ~false tire damping for numerical stability
System Matrices
State transition matrix
A = [-b_s/m_s, b_s/m_us, k_s, 0; % p_s b_s/m_s,(-b_s-b_t)/m_us, -k_s, k_t; % p_us -1/m_s, 1/m_us, 0, 0; % q_s 0, -1/m_us, 0, 0]; % q_t % Input matrix B = [0, -m_s; b_t, -m_us; 0, 0; 1, 0]; % u = [v_in(t); g]
Time vector
Setup the time step and end time
dt_ratio = 20; % ratio of time steps to fastest eigenvalue of the system matrix tau_fast = abs(1/max(eig(A))); % fastest system time constant, [seconds] dt = tau_fast/dt_ratio; % time step size, [seconds] t_end = 5; % end time, [seconds] time = (0:dt:t_end)'; % simulation time vector, [seconds]
Creat the input vector
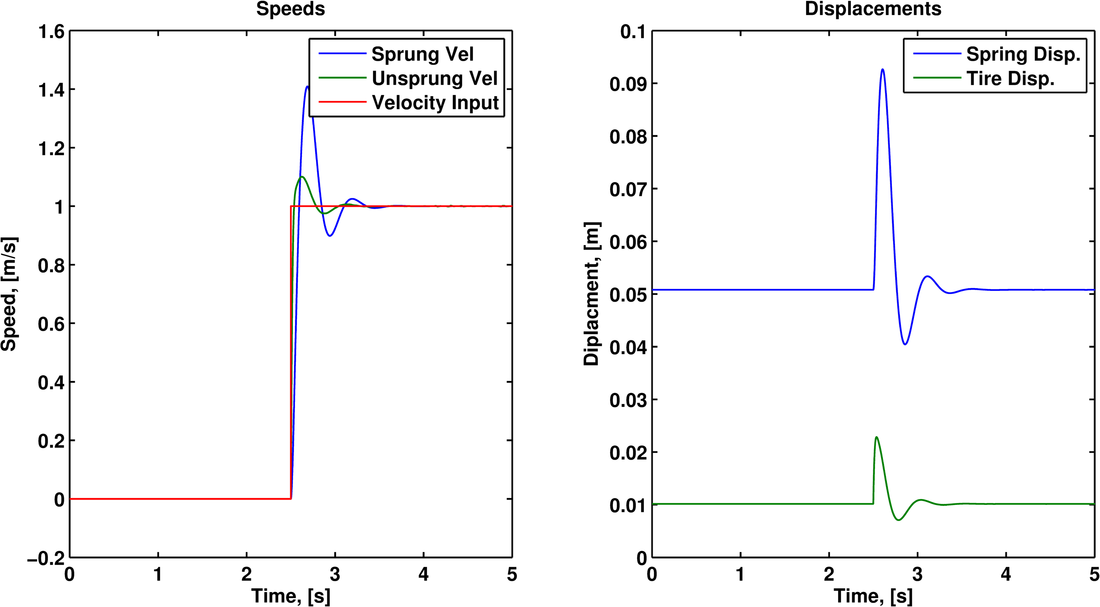
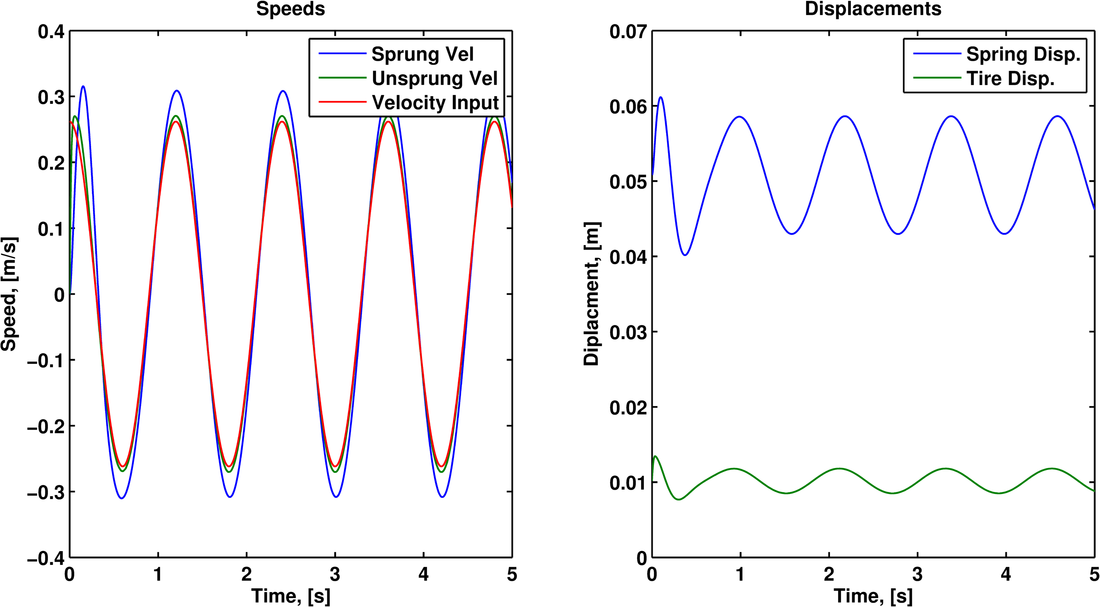
The velocity input time profile is generated. Two different profiles may be used. Set test_type to 0 for a step input, or to 1 for a sinusoidal input. The sinusoidal velocity input is derived from an arbitrary road profile.
U = 25; % forward velocity, [m/s] a_d = .05; % amplitude of road displacement, [m] d_b = 30; % bump spacing, [m] test_type = 0; if test_type == 1 % x_in = a*sin(b_d*x) then take the time derivative -> v_in = (2*pi/d_b)*U*a_d*cos((2*pi/d_b)*U*time); % velocity input, [m/s] test = 'sinusoidalInput'; else % Use for step velocity input v_in = zeros(length(time),1); v_in(round(length(v_in)/2):end) = 1; test = 'stepInput'; end
Initial conditions
There are four states for this system. The two momenta, which will be initialized as 0 (no initial speed for the masses) and the equilibrium displacements for the two compliance elements.
x_0 = [0, 0, 1/k_s*m_s*g, 1/k_t*(m_s + m_us)*g];
Call the ODE solver
We are using ode45, which is the solver that you will most likely use. It is a great first solver to try. There are many solvers in MATLAB and you can search for 'ode solvers' in the product help to learn more about those.
[t_out, x_out] = ode45(@Lab1_eqns, time, x_0);
Create outputs
Create the C matrix and then compute the output vector using the full state information from the ODE solver.
C = [1/m_s, 0, 0, 0; % output 1: v_s 0, 1/m_us, 0, 0; % output 2: v_us 0, 0, 1, 0; % output 3: displacement of spring 0, 0, 0, 1]; % output 4: displacement of tire y = zeros(size(x_out)); for i = 1:length(time) y(i,:) = x_out(i,:)*C'; end
Plot the data
The plot commands below are the ones I use for generating publication quality figures, which you will all need to learn how to do. Particularly for the PhD students here.
plots_on = 0; % I use this as a quick way to stop plotting. It's particularly nice for me during debugging. if plots_on F1 = figure(1); % Create a figure window and assign it to a handle, F1 here. lw = 1; FN = 'Arial'; FS = 12; FW = 'bold'; % Create variables for the linewidth, font name, font size and font weight set(F1,'units','inches','OuterPosition',[4.5 1 11.5 6.5]); % Set the figure window size using the figure handle F1 sp1=subplot(1,2,1); % Create a subplot plot(time,[y(:,1:2),v_in],'linewidth',lw); % add a plot to the subplot and specify the linewidths legend('Sprung Vel','Unsprung Vel','Velocity Input'); % Create a legend xlabel('Time, [s]','Fontsize',FS,'Fontname',FN,'Fontweight',FW); % Create an x-axis label ylabel('Speed, [m/s]','Fontsize',FS,'Fontname',FN,'Fontweight',FW); % Create a y-axis labe title('Speeds','Fontsize',FS,'Fontname',FN,'Fontweight',FW); % Create a title for the sublot set(gca,'Fontsize',FS,'Fontname',FN,'Fontweight',FW,'linewidth',lw); % Set the current axes fonts and linewidths sp2=subplot(1,2,2); % Create a second subplot plot(time,y(:,3:4),'linewidth',lw); legend('Spring Disp.','Tire Disp.'); xlabel('Time, [s]','Fontsize',FS,'Fontname',FN,'Fontweight',FW); ylabel('Diplacment, [m]','Fontsize',FS,'Fontname',FN,'Fontweight',FW); title('Displacements','Fontsize',FS,'Fontname',FN,'Fontweight',FW); set(gca,'Fontsize',FS,'Fontname',FN,'Fontweight',FW,'linewidth',lw); nameFig1=['Lab1Demo_' test '_032714']; % Create a name for the figure file export_fig([nameFig1,'.png'],'-transparent','-r300','-painters'); % Save a 300dpi version of the figure in png format using the expot_fig function. end
